Milano Show Control
Robots and Videomapping
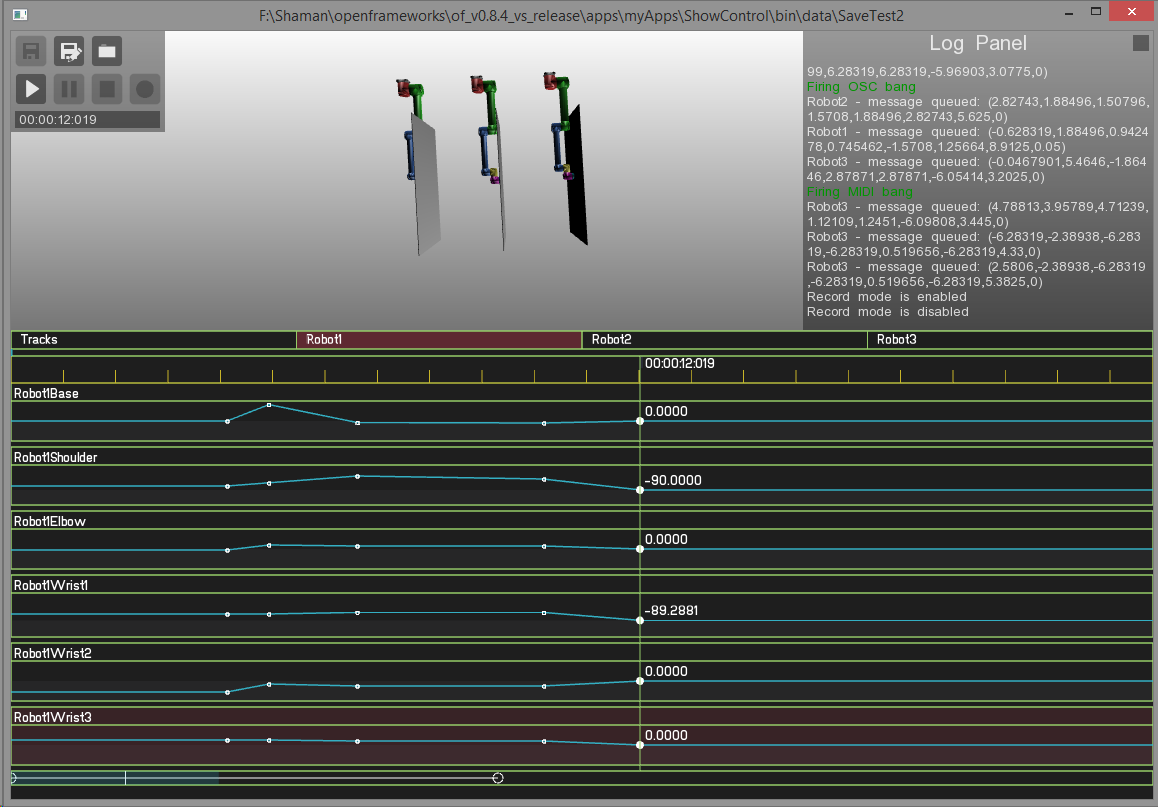
On this project, Germán Clark, Federico Linn and I worked on developing a central control application for a videomapping show that involves three UR10 industrial robots.
We developed ShowControl, a timeline-based application that allows to design and execute the show, including robots animation, events, OSC communication, and TCP communication. We also wrote the software running on each of the robots, this software receives commands from ShowControl and communicates with the videomapping application.
The videomapping was done by Jaime and Edi, from Vector001. The robots are videomapped in realtime using their current position.
The show is on permanent exhibition at Expo Milano 2015's Uruguayan pavilion.
This project was possible thanks to the hard work of some amazing people like Marco Colasso (direction, production, and sound design), Mathias Bianchi (3D simulations and architecture project) and Eduardo Lamas (audiovisual production), and Garín, Mayda and all the people at Súbito Red.
Pictures



Video
Finished show (bad audio quality)
Credits:
Exhibitions: